All Projects
HERMES EXO
Lower-Limb Powered Exoskeleton
A modular, highly customizable robotic exoskeleton engineered to restore bipedal mobility and independence for individuals with paraplegia through advanced biomechatronics and ergonomic design.
About the Project
What is HERMES EXO?
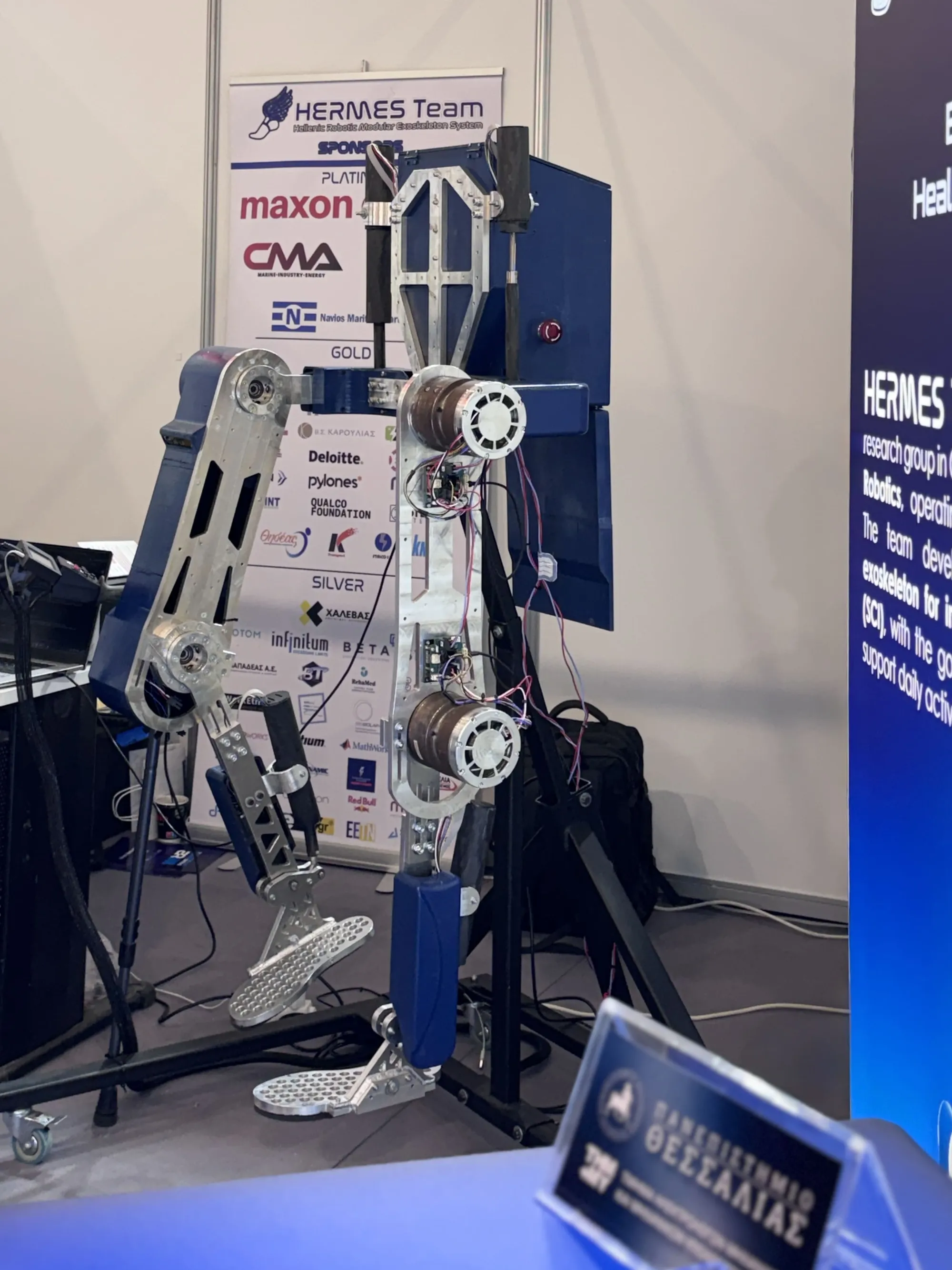
The HERMES EXO is the team's primary research vehicle — a fully actuated lower-limb exoskeleton designed from the ground up to restore bipedal mobility to individuals with complete or incomplete paraplegia due to spinal cord injury.
Built on a modular architecture, the EXO allows rapid iteration across mechanical, electrical, and software subsystems — enabling the team to adapt quickly based on pilot feedback and competition requirements. Its ergonomic frame accommodates a wide range of body morphologies, prioritising comfort and safety during extended wear.
Competing at the CYBATHLON — organized by ETH Zurich — the EXO navigates complex real-world obstacle courses including ramps, stairs, doors, and uneven terrain. Every engineering decision is tested against a single benchmark: can our pilot move freely, safely, and confidently?
The HERMES EXO is not just a competition machine — it is a platform for developing assistive technology that can one day reach the people who need it most.
Technical Overview
Project Specifications
Core technologies, architecture, and application focus of HERMES EXO.
Platform
Lower-Limb Powered Exoskeleton
Framework
ROS2
Architecture
Modular Design
Focus
Mobility Restoration
Target Users
Individuals with Spinal Cord Injury (SCI)
Technologies
Embedded Systems, Real-Time Control, Biomechatronics
Visual Archive
Project Gallery

Hermes-EXO

Open Lab Day 2025
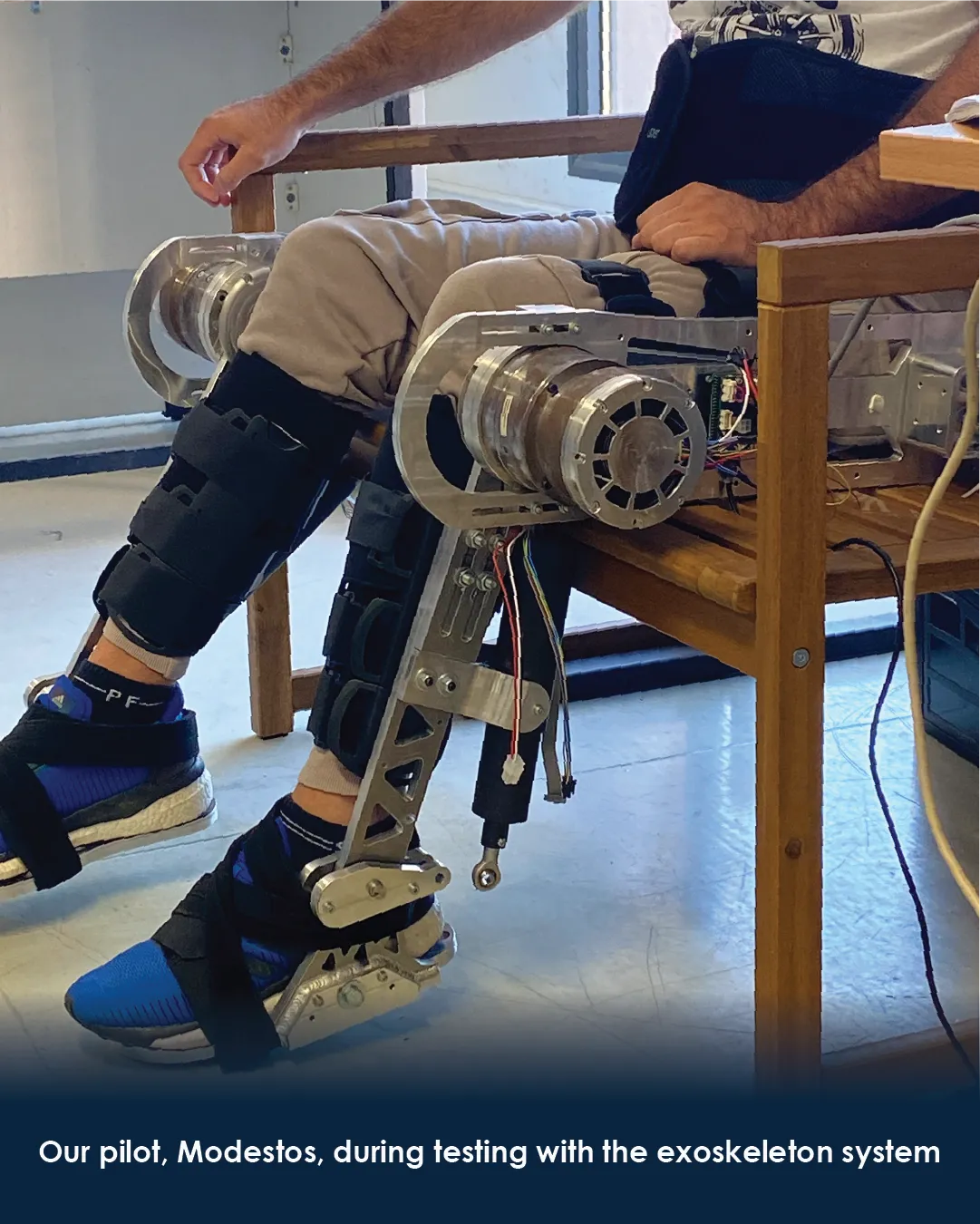
Testing with our pilot
Open Research
Want to Know More?
Explore the full HERMES research ecosystem — from BCI systems to motion capture — or get in touch with the team directly.